官宣 | 留形科技 x ROBOCON
留形科技 · 2026-05-14 00:00
第二十五届全国大学生机器人大赛ROBOCON,正在把机器人竞技推向新的阶段。相比以往,今年的ROBOCON进一步提高了机器人在复杂环境中的感知与自主决策门槛。而这背后,本质上是在考验机器人是否真正具备稳定、持续的空间感知与环境理解能力。

今年,留形科技正式成为ROBOCON「赛事支持企业」。空间记忆模组Odin1,也正持续在为参与多项具身智能赛事中的队伍提供底层感知支持。面对这些看似不同的赛场难题,我们其实在尝试回答同一个问题:机器人,究竟该如何真正“看懂”世界?
01 | RC不同的赛题,本质上是同一道题
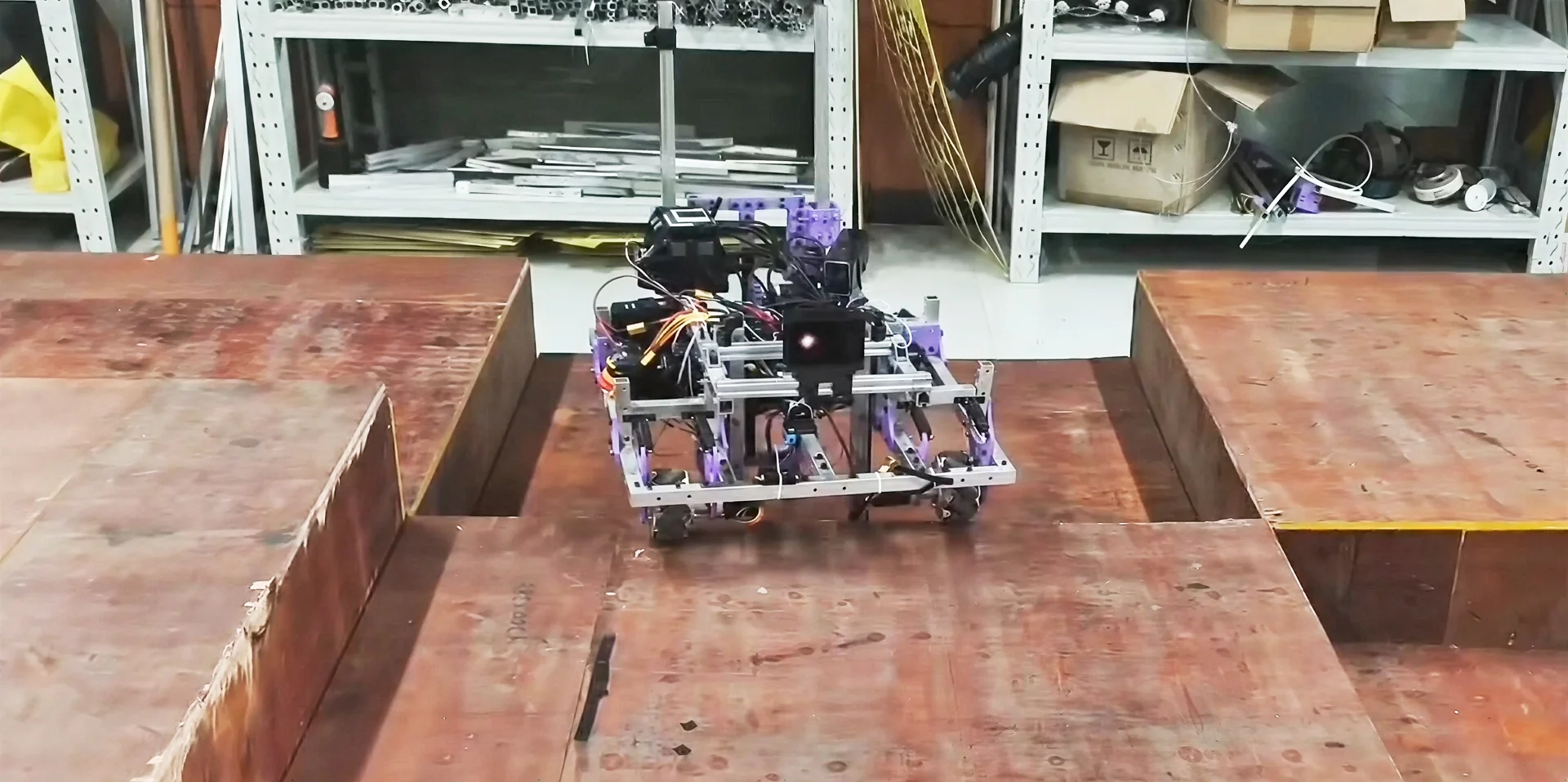
目前Odin1在RC战队中的主要应用,集中在「武林探秘」赛项。在该项比赛中,R2是一台被规则严格限制的全自动机器人。它需要独立穿行于复杂的高低方块阵,在无法依赖人工干预的情况下完成任务。真正关键的并不是“移动”,而是机器人在复杂环境中对自身空间状态的持续理解与稳定定位能力。
面对梅林区域连续变化的高低落差,Odin1能够持续输出低延迟、高稳定的位姿信息,为机器人提供稳定的定位参考。当空间感知足够稳定之后,队伍便可以将更多计算与决策资源集中于高层任务执行上。在严格通信受限的规则下,机器人只能依靠本体感知完成空间理解与决策。而当系统逐渐从“机械结构驱动”走向“空间智能驱动”,决定上限的因素也已经不仅仅是机械结构本身。

此外,Odin1还可应用于仿生足式机器人挑战赛以及「沙排之王」中。
仿生足式赛场中的碎木坑、高墙与复杂地形,会持续干扰机器人的环境判断。在障碍赛中,O1能够稳定识别坑边、台阶高度与地形变化,为机器狗提供可靠的落足点规划与路径判断能力;在任务赛中,也可进一步支持目标识别、物资定位与环境感知,让机器人真正开始“理解场地”。而在「沙排之王」中,面对高速变化的排球轨迹,O1依靠大视场角、高帧率图像与实时本体定位能力,持续追踪排球空间位置和运动状态,并输出稳定空间坐标,让机器人不仅“看见球”,更能判断球下一秒会出现在哪里。
02 | ROBOCON的题,其实是未来机器人的题

梅花桩、碎木坑、动态排球轨迹…这些问题,其实都不只属于ROBOCON。它们更像是真实世界的提前预演:工业现场、仓储物流、户外巡检、地下空间、复杂公共环境…
机器人一旦离开实验室,就迟早要面对这些问题。而所有问题最终都会回到同一个核心:机器人是否真正具备稳定、可靠、持续的空间感知能力。
这也是留形科技选择支持ROBOCON的原因。因为我们相信:今天在赛场上被高强度验证的感知算法与导航能力,终究会成为下一代机器人进入真实世界的重要基础设施。
我们想做的,远不止支持一场比赛,更希望把那些工业级、经过长期验证的空间感知能力,提前交到年轻工程师手中。把繁琐、重复、容易踩坑的底层工作接管下来,让真正聪明的创造力能够被释放到更重要的问题上。
技术没有捷径。但创新,应该拥有更坚实的肩膀。2026赛季,留形科技将与所有参赛战队一起,把这些问题继续解下去。
机器人终将走进真实世界。
而今天的赛场,正在提前回答未来。